Les architectures (ou topologies) définissent la structure de communication entre les différents éléments du système complet.
Suivant de près l’évolution technologique de l’informatique, ces architectures se sont modifiées au fil du temps.
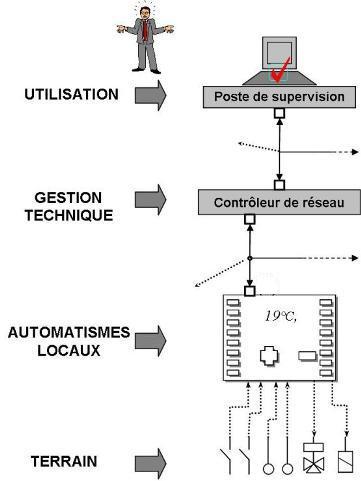
D’une façon générale, la structure des systèmes a évolué d’une forme hiérarchisée (à plusieurs étages) à une forme toujours plus linéaire, en raison des performances croissantes des réseaux de communication.
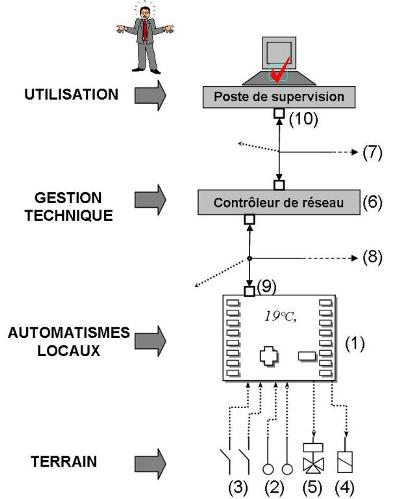
Dans l’architecture classique (dite hiérarchisée), née dans les années 1980, on distingue 4 couches superposées.
- La plus basse, correspond aux capteurs et actionneurs qui équipent l’installation (une chaufferie par exemple)
- La plus haute comporte le poste de supervision avec son interface opérateur.
On distingue.
- La couche "terrain", constituée par les capteurs (sondes (2) et contacts (3)) et actionneurs (relais (4) et servomoteurs (5)), est la plus basse… au-dessus du "sous-sol", autrement dit l’installation technique commandée (la chaufferie ou la centrale de traitement d’air dans le domaine du Génie Climatique).
Les capteurs comme les actionneurs sont reliés à la couche supérieure par de classiques liaisons électriques, de préférence standardisées, signaux 0-10 [V] ou 4-20 [mA].
- La couche "automatismes locaux" qui comporte le régulateur-automate (1) (aussi appelé UTL, Unité de Traitement Local), qui reçoit les informations des capteurs, les traite (c’est la régulation et l’automatisme), et commande les actionneurs
Les couches "automatismes locaux" (1), et "terrain" (2), (3), (4), (5) sont autonomes et peuvent fonctionner sans ordinateur de supervision. Sur la figure ci-dessus, on observe une UTL équipée d’un afficheur et d'un clavier. Parfois, c'est un terminal de lecture et de paramétrage ("pocket") qui permet la lecture des valeurs des capteurs, la modification de consigne, et la commande des actionneurs.
- La couche "gestion technique" qui désigne le contrôleur de réseau (6). Ce dernier,
- constitue une passerelle entre le réseau de gestion (7) et le réseau des automates (8). C’est le convertisseur de liaison nécessaire au dialogue entre 2 réseaux de nature différente.
- organise le trafic des informations, c’est un gestionnaire de communication.
La nécessité du contrôleur de réseau s’explique en particulier par le fait qu’une UTL dispose d’une prise de communication (9) qui n’est pas compatible avec la prise réseau RJ45 (10) de l’ordinateur
- La couche "utilisation" qui réunit le poste informatique et le logiciel de supervision
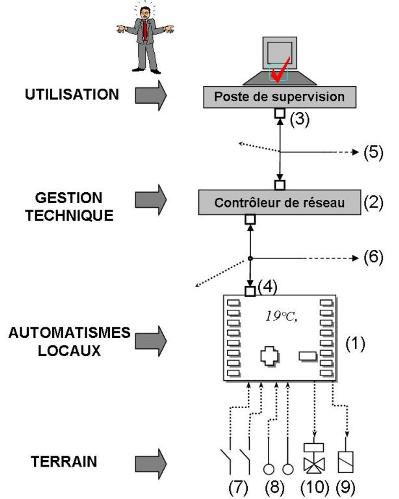
Question
(1) Régulateur-automate
(2) Contrôleur de réseau
(3) Prise réseau RJ45 de l’ordinateur
(4) Prise de communication de l’automate
(5) Réseau de gestion
(6) Réseau des automates
(7) Contacts d’entrée
(8) Sonde
(9) Relais
(10) Servomoteurs
Question
Le contrôleur de réseau, qui joue le rôle d’interface matérielle, et le logiciel de supervision.
Visualisons un système correspondant à une architecture hiérarchisée, le système metasys du constructeur américain Johnson Controls.
 Source Johnson Controls
Source Johnson Controls
Question
(1) Poste superviseur
(2) Contrôleur de réseau
(3) UTL
(4) Réseau de gestion
(5) Réseau d’automates
Commentaires
- Les constructeurs utilisent des références qui leur sont propres pour désigner les composants d’un système par exemple N2 pour désigner un bus RS485.
- Dans les grands bâtiments, plusieurs contrôleurs de réseau permettent d’aérer l’architecture et d’éviter la saturation d’un seul réseau d’automates.
- Au même niveau hiérarchique que les UTL (souvent aussi appelé ARCP), un registre motorisé VMA de centrale d’air peut donc être piloté directement depuis le poste de supervision.
- Le réseau de gestion est au standard BACnet qui sera décrit ultérieurement.
Remarques
- Les termes ci-avant sont utilisés par la société Johnson (N2, VMA…etc)
- Actuellement les marques de régulation standardisent leur protocole de communication (voir LON au niveau terrain par exemple et Bacnet over TCP/IP au niveau ARCP (automate) vers la GTB.)
- Le Bus Bacnet est un protocole standard utilisé par les principales marques, Siemens , Honeywell, Johnson, Sauter, K&B, Schneider……
- VT100 n'est plus utilisé dans les architectures modernes car tous les régulateurs comportent une porte WEB Browser.